Home
Contact
Jumptuck
Jumptuck
Home
Contact
Menu
category
Projects
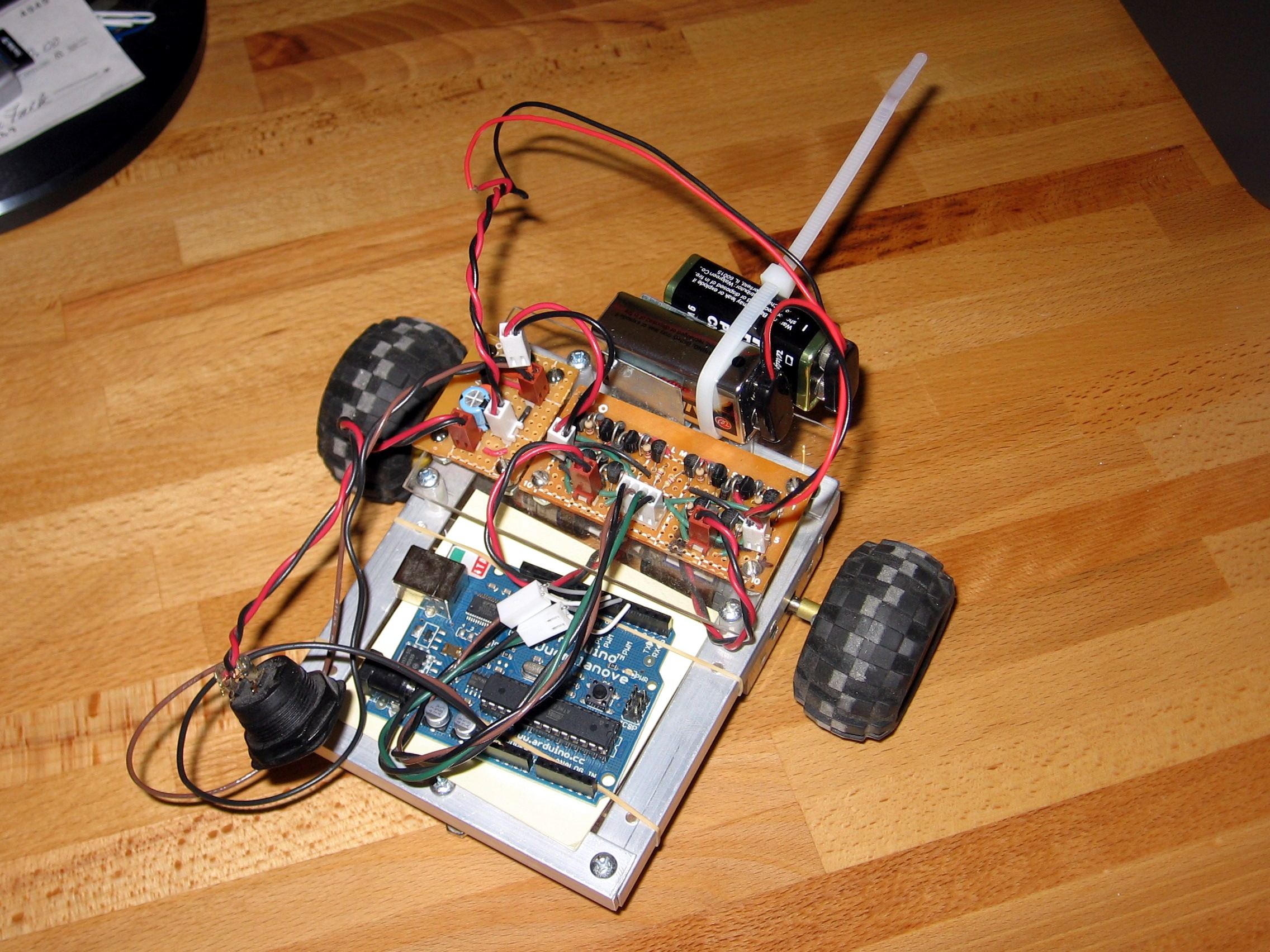
01 December 2011
Robot body made almost entirely from parts sourced locally
10 November 2011
Preview: I’ve got big plans for this little bulb
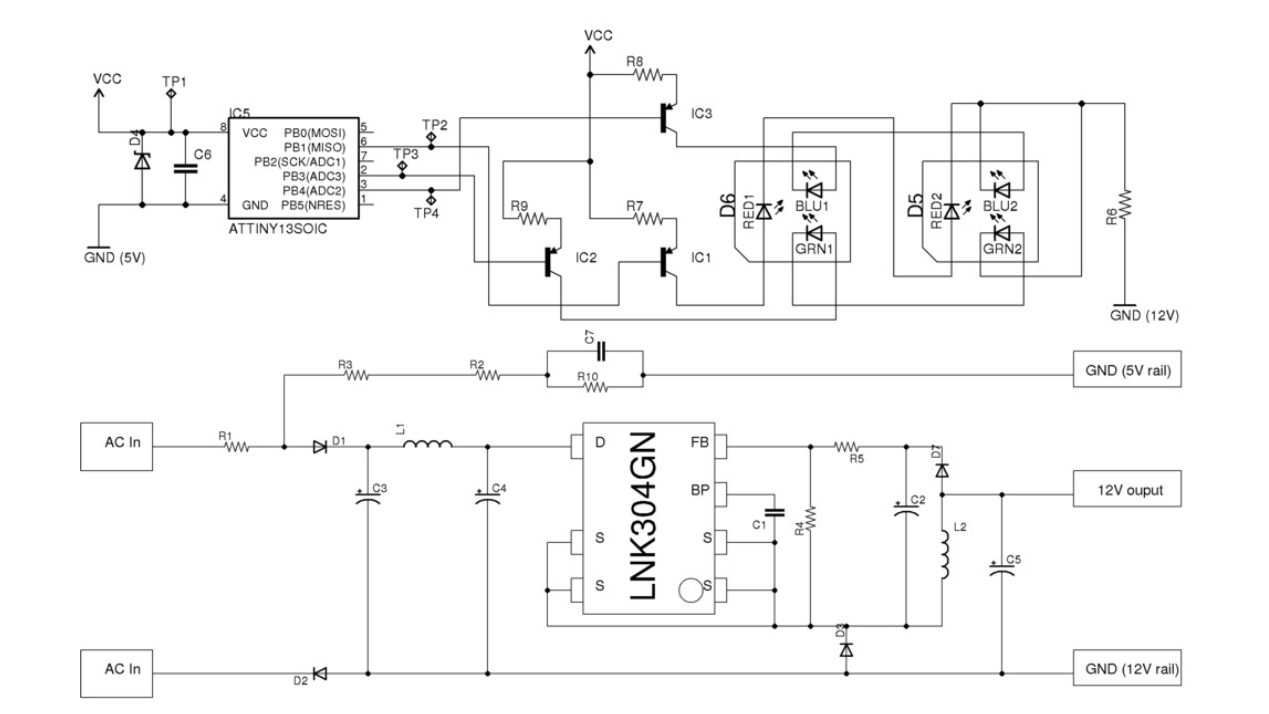
08 December 2010
Sneak a peek at the LED Lighbulb schematics
30 January 2010
Auto-dine 2009
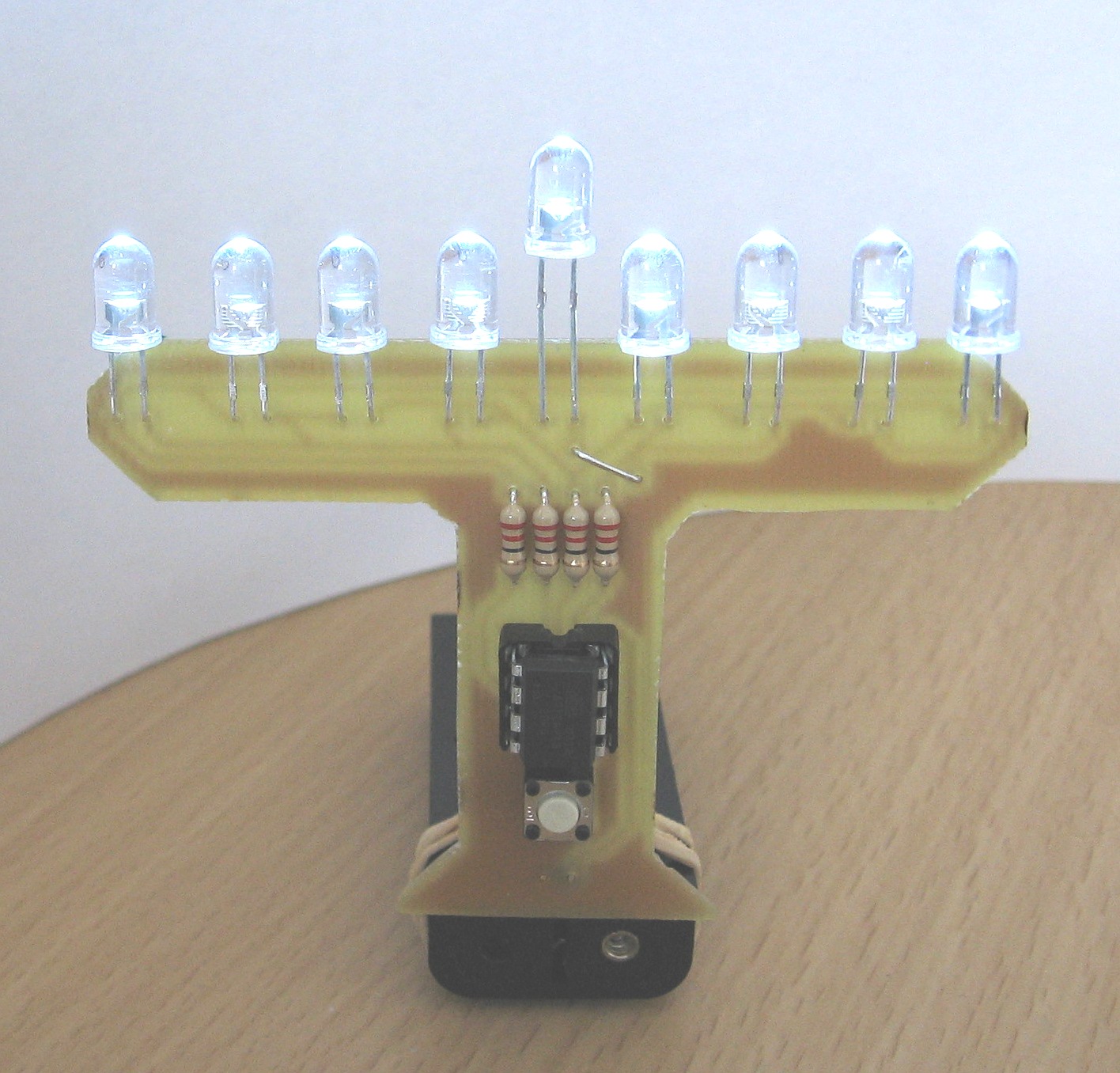
13 November 2008
LED Menorah powered by AVR tiny13
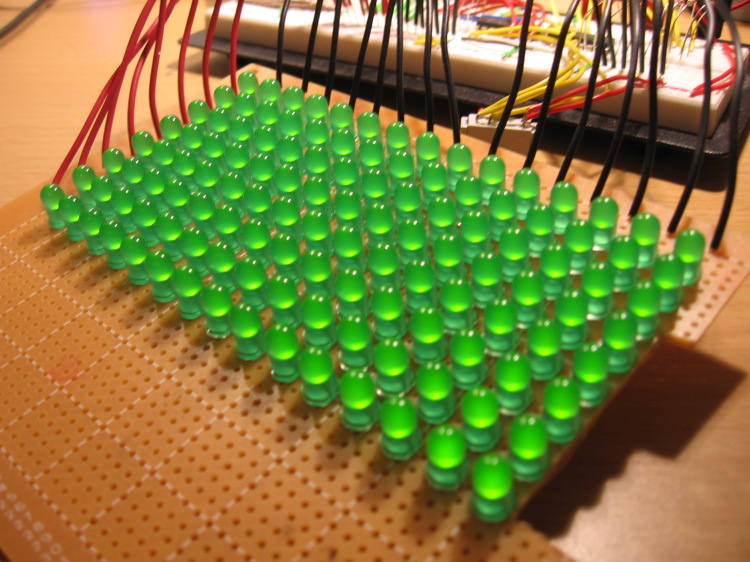
26 October 2008
LED Display Matrix
© 2024 Mike Szczys
essential