Home
Contact
Jumptuck
Jumptuck
Home
Contact
Menu
category
AVR
20 December 2011
Light programming showing some results
12 December 2011
AVR Analog Comparator
17 November 2011
Parallel port trigger tells me when I’m transcoding
28 October 2011
BCM and Exponential Duty Cycle improve LED intensity levels
27 October 2011
Developing a Larson Scanner
24 October 2011
Larson Scanner project introduction
08 December 2010
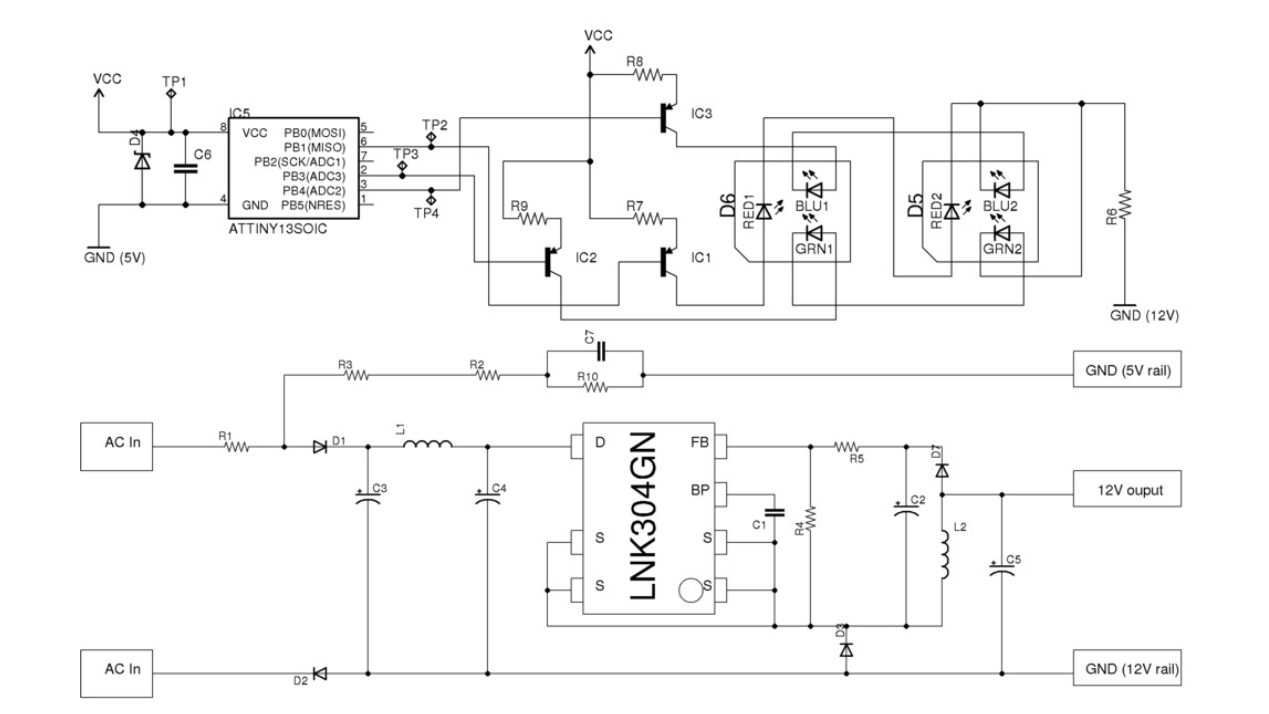
Sneak a peek at the LED Lighbulb schematics
15 November 2010
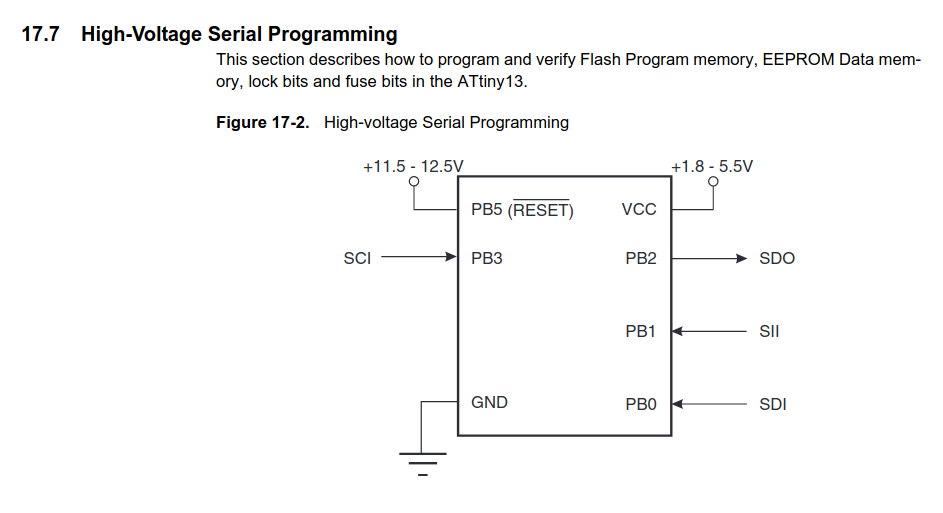
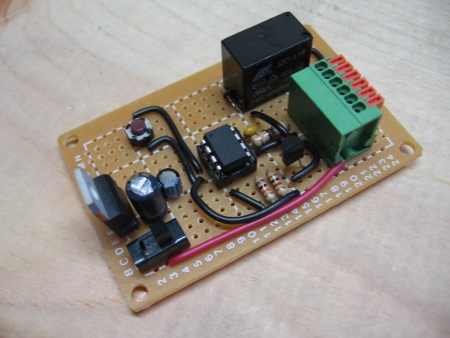
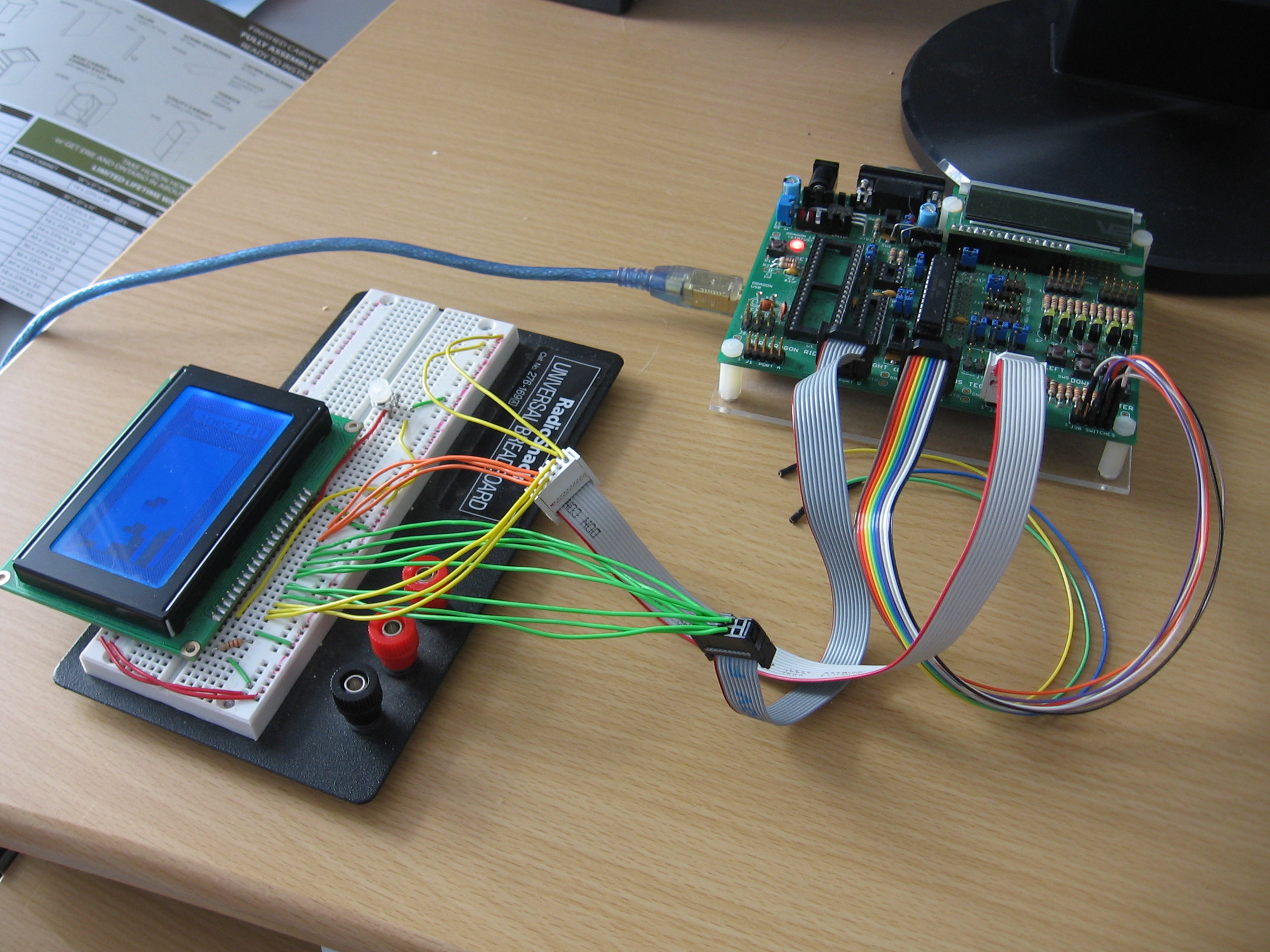
Light bulb microcontroller salvaged with HVSP
15 November 2010
LED lightbulb schematic
12 August 2010
Porting AVR code for MSP430 chips
01 August 2010
Garage door code button
13 January 2010
Tetrapuzz – Tetris clone for AVR
16 August 2009
Translating easy board design into easy code.
25 February 2009
RSS Reader using AVR mega8
13 December 2008
AVR Development in Eclipse IDE (Part 2)
06 December 2008
AVR Development using Eclipse
17 November 2008
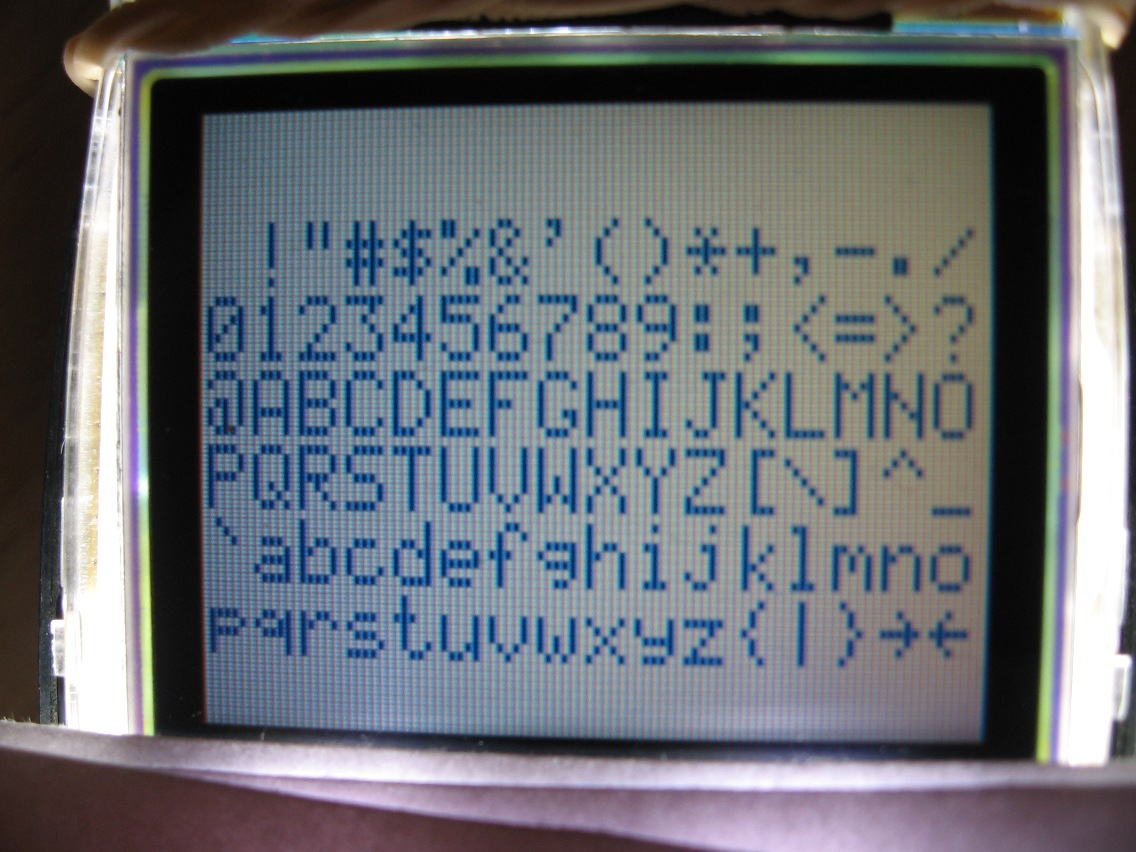
Character Set for 3595
16 November 2008
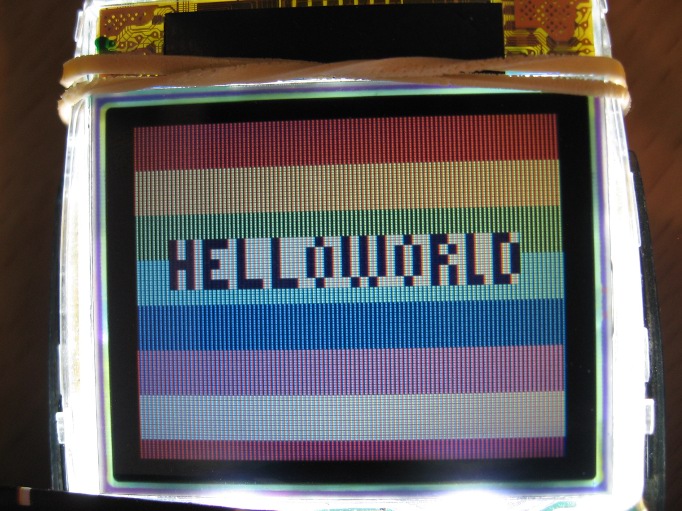
3595 LCD – Hello World
14 November 2008
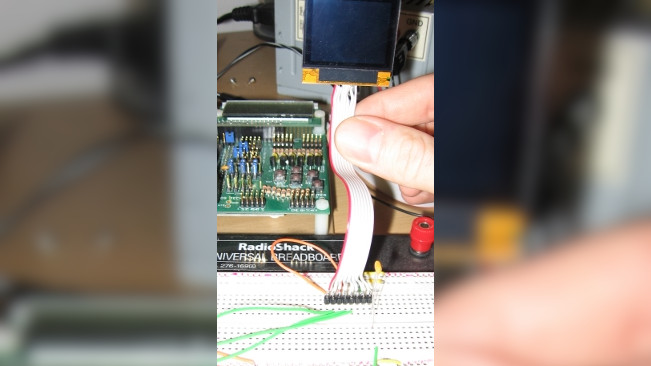
3595i LCD – First Signs of Life
13 November 2008
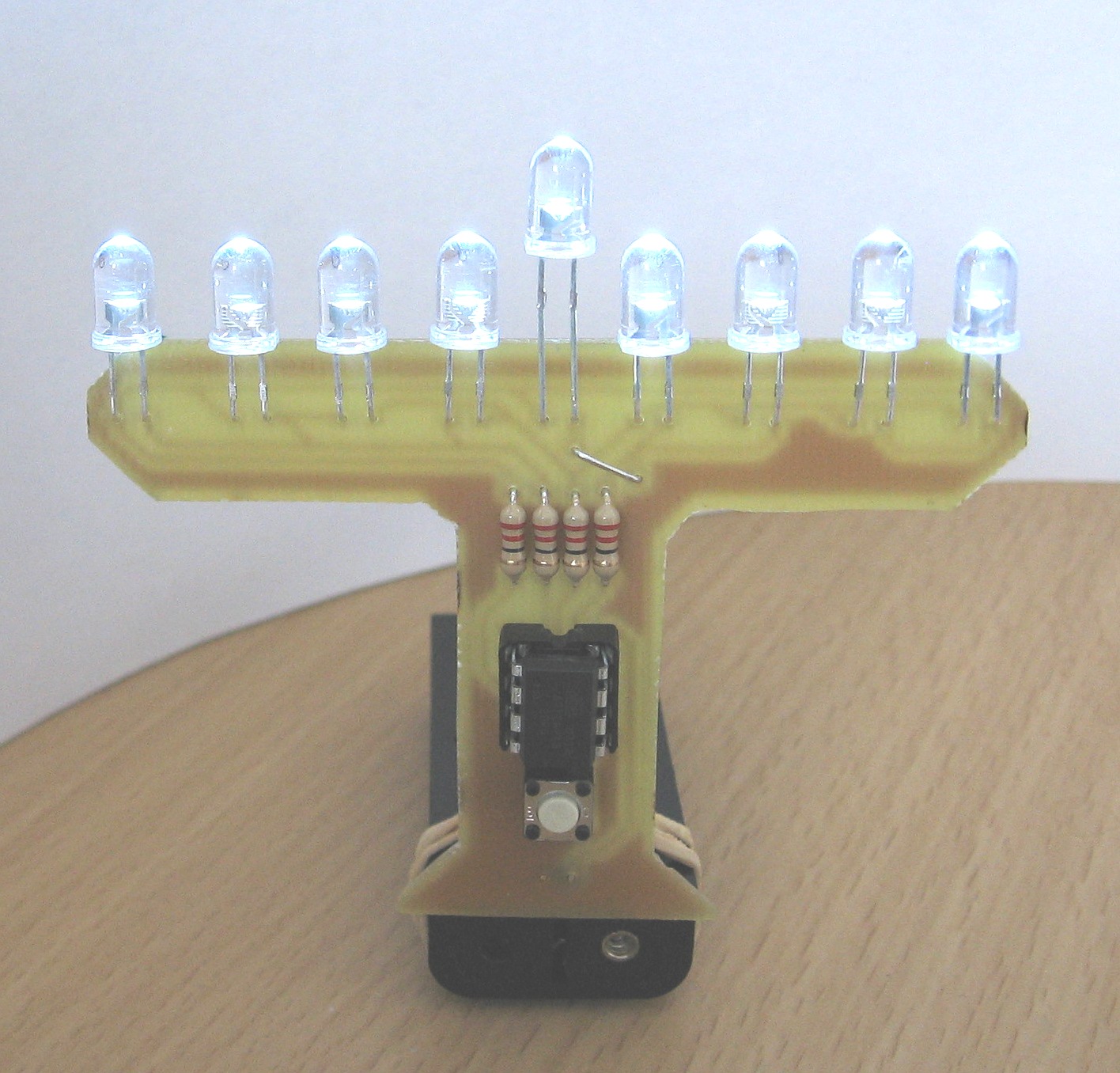
LED Menorah powered by AVR tiny13
10 November 2008
Programming AVR on Ubuntu 8.10 Intrepid Ibex
10 November 2008
LCD – a whole lot of nothin’
28 October 2008
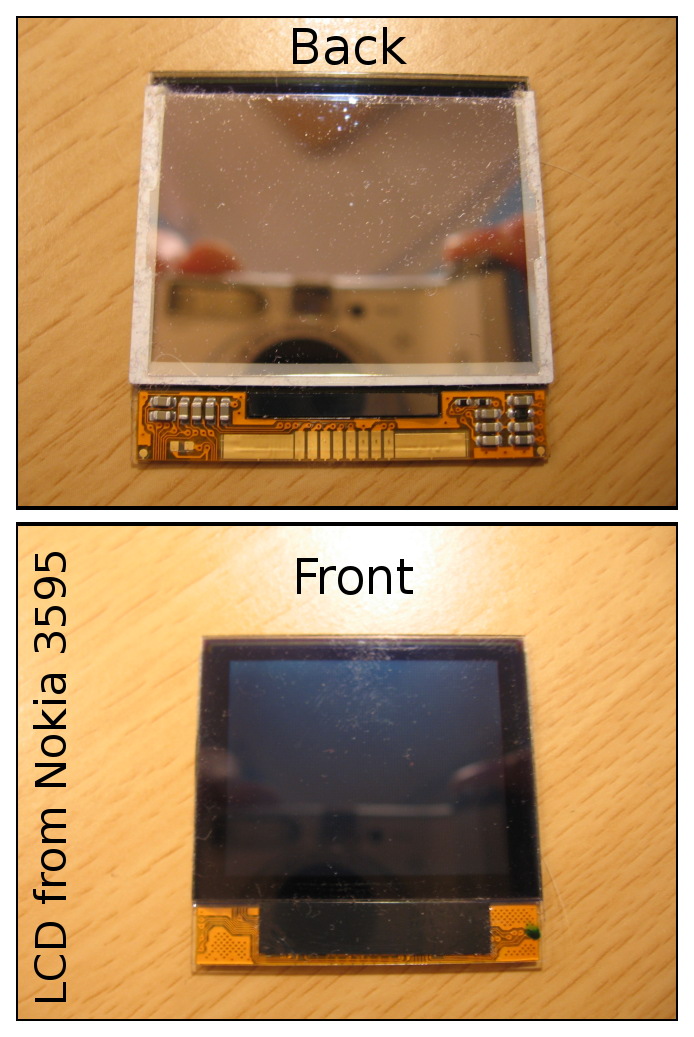
3595 LCD Interface – Preliminaries
26 October 2008
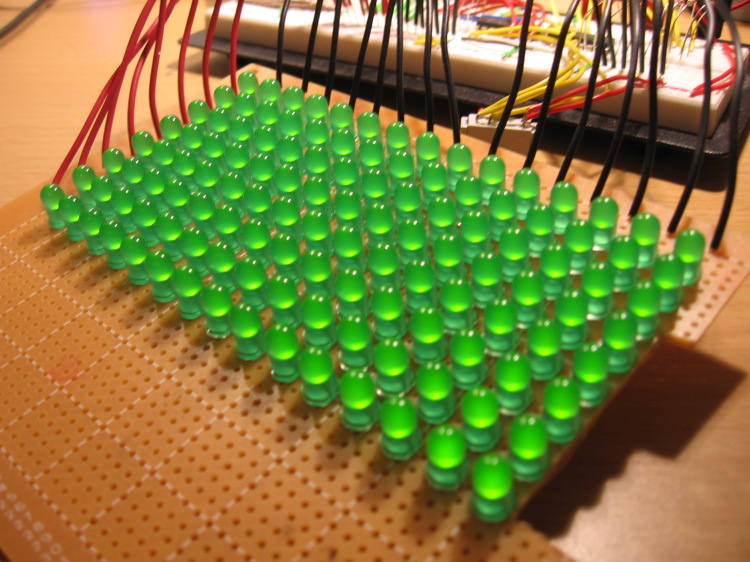
LED Display Matrix
26 October 2008
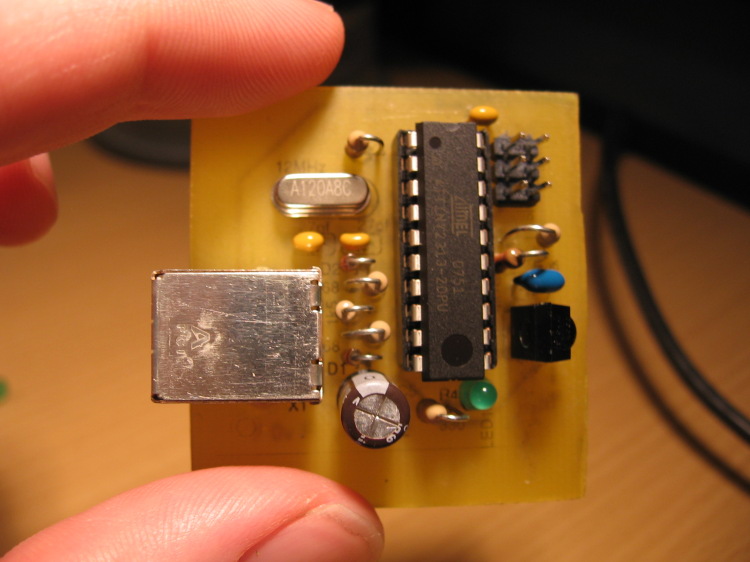
USB IR Receiver
26 October 2008
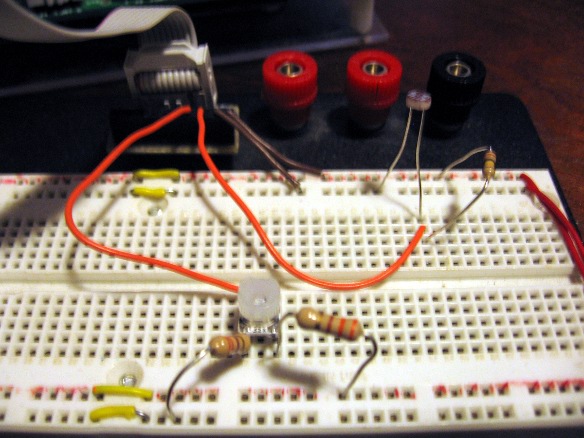
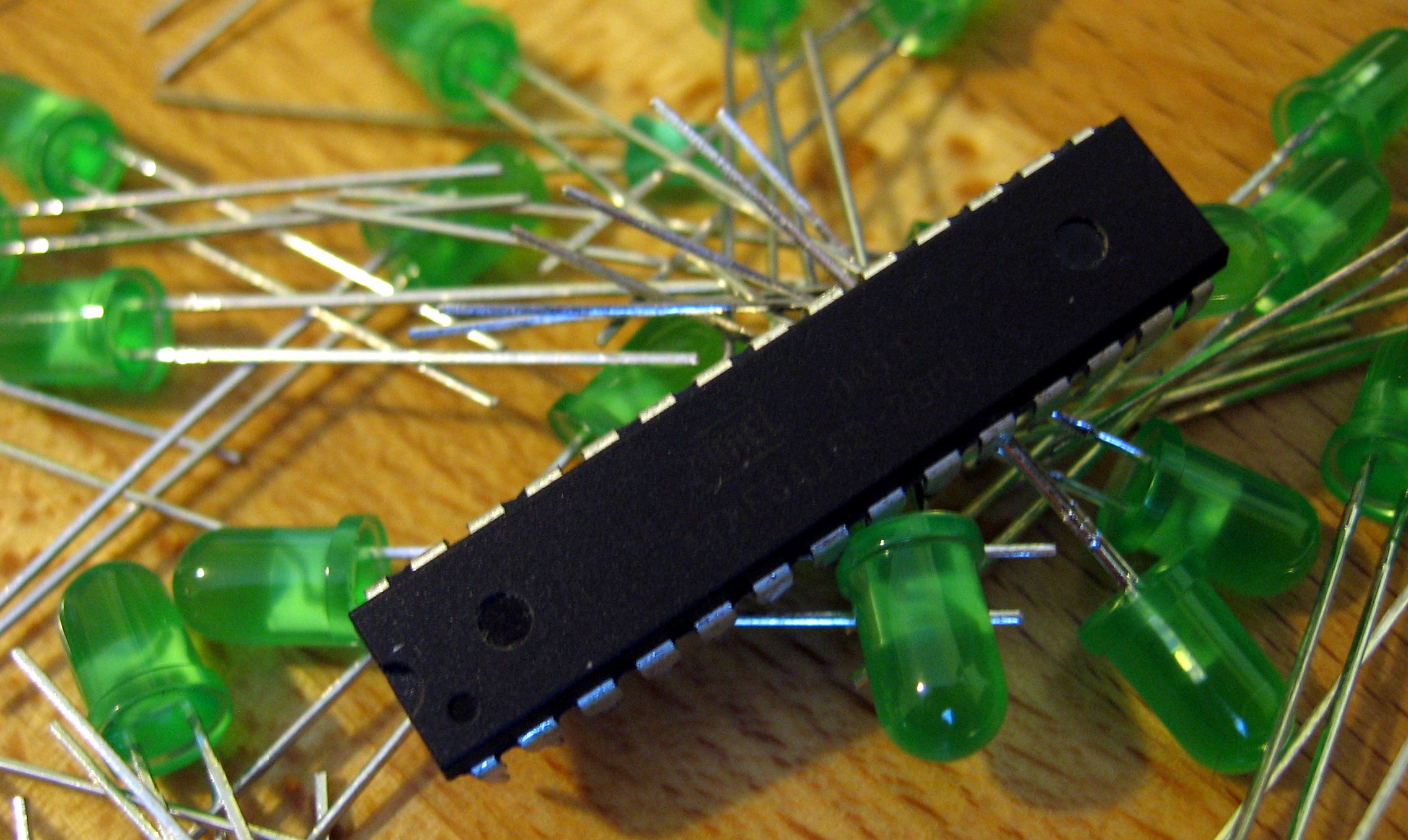
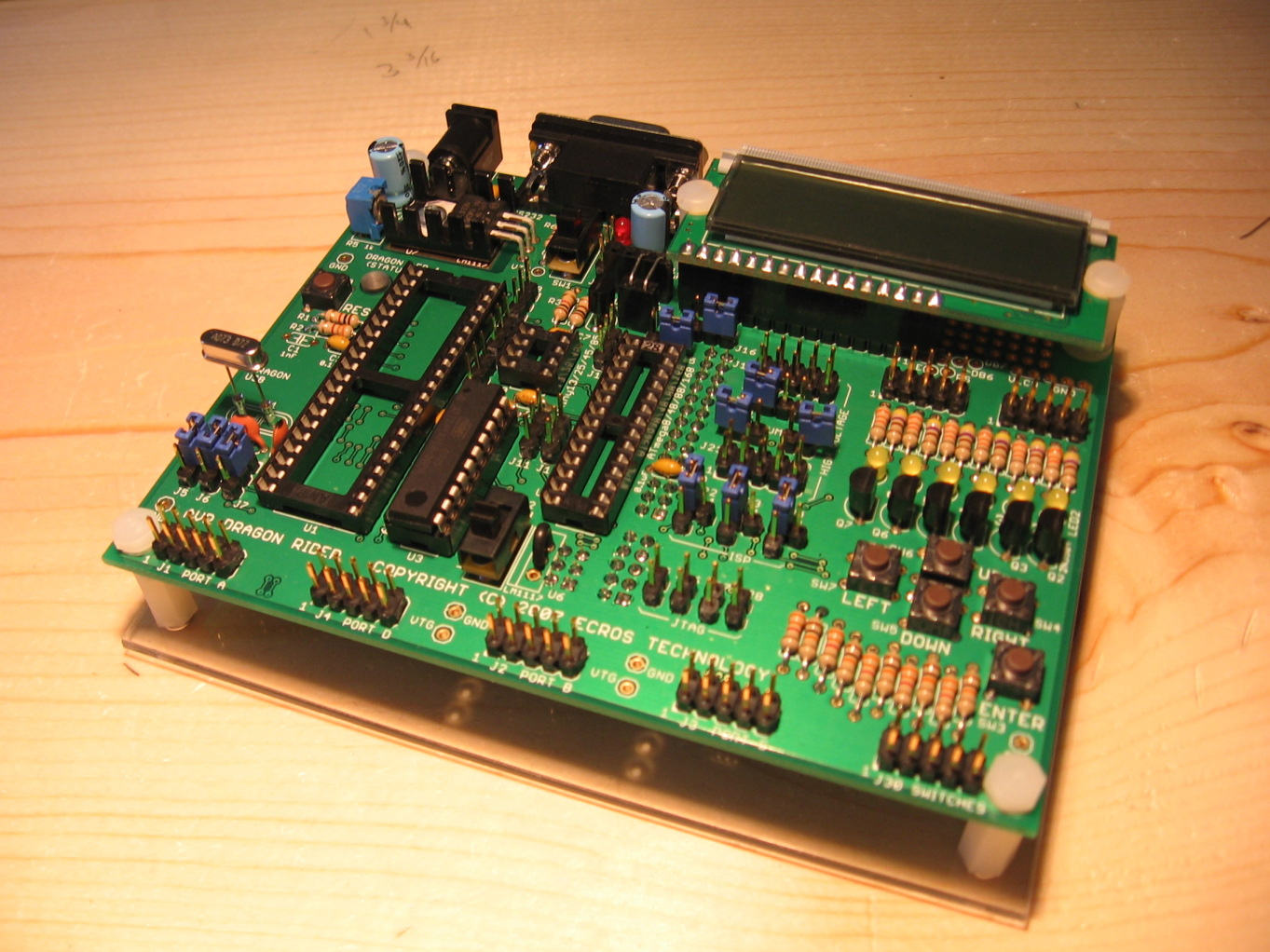
AVR Programming and Prototyping
28 February 2008
what’s this about?
© 2024 Mike Szczys
essential